

 联系我们
联系我们

功能概要
YRC1000 可以以 Ethernet作为媒介进行数据通信,使用以下的功能。
高速 Ethernet 服务器通信功能
FTP 服务器功能
DCI 功能
FTP 客户端功能
通过WEB浏览器查看内部数据的功能。
Ethernet 服务器功能
主机控制器功能
独立系统功能
上述这些功能,根据通信的启动源、远程设定、通向对象等不同有以下几种分类:

各个功能会在以后的文章中详细说明,表中灰色部分的功能用于保持与以往控制柜的兼容性,请勿用于新构建系统用的通信。购买了Ethernet 功能的YRC1000 ,在出厂之前就完成了高速 Ethernet服务器功能的基本设定。
本文介绍《高速 Ethernet 服务器通信功能(UDP)》,往期文章请参考《安川机器人以太网服务器功能(TCP/IP)》。
功能解析
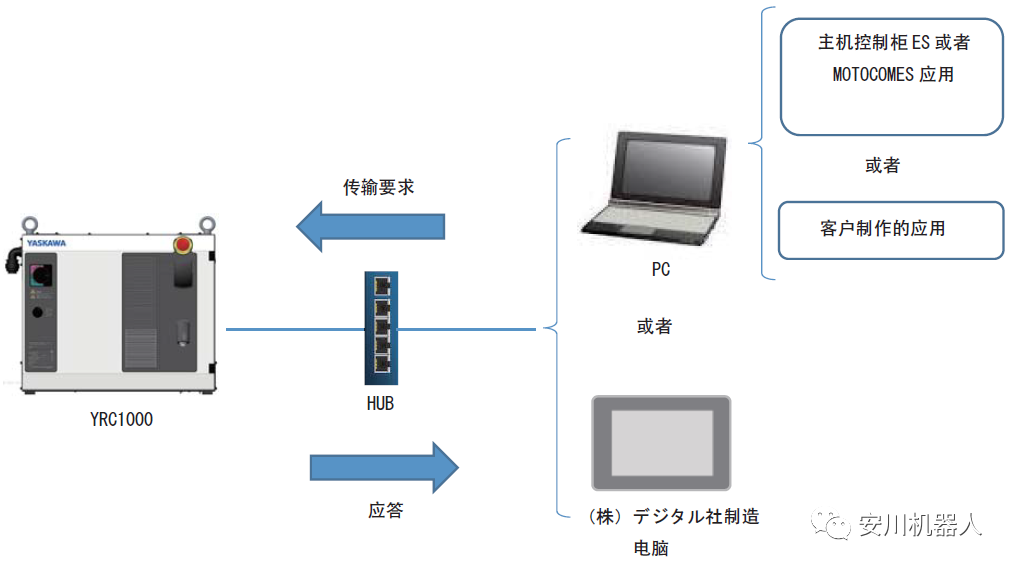
高速 Ethernet 服务器功能是根据我司独自开发的简易/高速通讯协议,在PC等设备上操作, 收发YRC1000内部数据,监视机器人状态,控制机器人的功能,也可保存YRC1000 内部数据的统括文件(CMOSBK.BIN)。高速 Ethernet 服务器功能由以下部分构成:
设定:
购买了Ethernet 功能的YRC1000 ,在出厂之前就完成了高速 Ethernet服务器功能的基本设定。
特点:
只需要连接网线,不需要增加额外硬件
可读写机器人IO、变量、位置坐标、程序内容等数据
可以控制机器人的运动
需要编写程序(C/C++/C#/VB/LabView等)
以太网通讯(UDP)






数据互换示例及注意点
数据互换示例
例1:上位机发送P变量X轴坐标值3.11至机器人
Ø将值转换成整数(X轴乘1000)→ 3110
Ø将3110转换成16进制 → 0x0C26
Ø将0x0C26高低位转换 → 0x260C
Ø发送给机器人16进制数组:{0x59, 0x45, ……, 0x26, 0x0c, ……}
例2:机器人回复B变量的值36给上位机
Ø上位机接收到16进制数组:{0x59, 0x45, ……, 0x24, ……}
Ø将数据值0x24转换成10进制 → 36
Ø确认B变量的值为36
UDP通信特点
机器人在任何模式下都可以通讯(某些命令需要在Remote模式下,比如文件的收发时,且要将虚拟输入信号的87015置为【ON】状态)
高速 Ethernet 服务器功能使用时的UDP端口是10040、10041(请确认这些端口是否被 Firewall 或杀毒软件禁用)
通信速度比以太网服务器功能更快
必须以16进制数组发送与接收数据
数据高低位需要互换
高速 Ethernet 服务器功能传输的数据包由标头部(32Byte)+ 数据部(可变:zui大 479Byte)所构成
- 下一篇:暂无
- 上一篇:安川机器人节拍时间测算功能